俺ロボの第2次改造仕様が組み上がりました。12月13日のイベントに向けた暫定仕様ですが。

画像1枚目はアルミ板をテキトーに切って折り曲げて穴明けただけの前襟。別名『よだれかけ』。胸の内側にスピーカーを固定しているネジのうち2本を使用して取り付けるだけの簡単な部品ですので、これは自作しました。
首がなくなると同時に頭部に使っている自転車のテールライト部品の下側のフタもなくなってしまったので、アゴの下から覗くと『目』のLED用の基板が丸見えだったのを塞ぐための部品です。
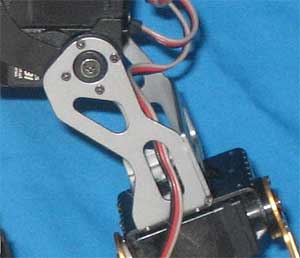
上腕部ブラケットはRB2000の標準の脛ブラケットを流用。肘部のサーボブラケットにネジ止めするための取付穴のみ加工してから、アルマイト加工してあります。これにより腕が約7mm伸びました。腕が伸びたことで攻撃の射程距離も伸び、このすぐあとに行う予定の、暫定の付かない第2次改造では「つかみ腕」にするための準備でもあります。

大腿ロール軸のブラケットにはRobovie-X用の部品を使用しました。これにより脚も約10mm伸びました。
ロール軸から下の脚が長くなったことで、攻撃時によく使う「横歩き」が速くなる効果が期待できます。実際にそうなるかどうかは、モーションとバトル中の操作次第ですが。
首が消えて頭サーボがなくなったことにより、現在18軸になっています。

すでに12月13日に開催されるロボプロステーションチャレンジカップのライトウエイトクラスという重量1500g以下のクラスにエントリーしているのですが、この状態で1300gくらいなので、出場にはぜんぜん問題なし。ていうか軽すぎ。ダミーに肘ヨー軸サーボでもつけて(モーションではぜんぜん使わずに)もっと腕を伸ばしてやろうかと思ってしまいます。前にも書いたように、どうせ腕にはサーボが追加されるわけですし。
腕も脚も伸びたことにより、ほとんどのモーションが使えなくなりました。起き上がりすらも……。
先日、雲魂の夜にかろうじて起き上がりだけは何とかしましたが、まだ歩けない……。
そんなわけで、これから大急ぎでモーションの修正です。
| https://blog.tsuduki.com/index.php?e=81 |
|
ロボット | 11:55 PM |
comments (0) | trackback (x) |






